
LENS Diagram
When Robots Fly
From the Improbable to the Spectacular, a Journey Inspired by Nature
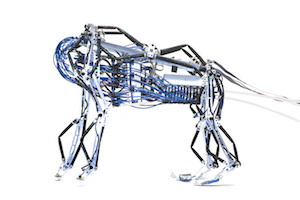 PHOTO: Michael F. McElroy
PHOTO: Michael F. McElroyPUPPY: Its four legs model the design and movements of a greyhound, thanks to data from X-ray videos of dogs and power from air-actuated muscles. This dog robot in Roger Quinn's lab uses rat-inspired neurology, part of an ongoing effort to create more graceful, precise and controlled movements.
When Roger Quinn opened his biorobotics lab in 1990 at Case Western Reserve, critics were dismissive: Robots are made of metal, motors and electronics, they said, which are completely different from the muscles, nervous systems and organic materials found in animals.
How times have changed.
Today, engineers are taking cues from animal anatomy and nervous systems to create biologically inspired robots with improved ability to complete tasks and solve problems. And Quinn's lab has grown to include 20 graduate students, numerous undergraduates, one postdoc and researchers from across campus and around the world.
"Our bioinspired group was one of the first of its kind," said Quinn, PhD, the Arthur P. Armington Professor of Mechanical and Aerospace Engineering. "Since then, the field has grown tremendously, and we expect that growth to continue. There is so much more to learn."
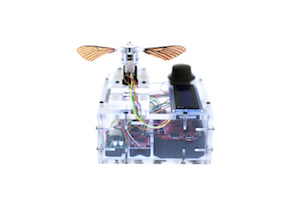 PHOTO: Michael F. McElroy
PHOTO: Michael F. McElroyMOTHBOT: These wings emulate the geometry, weight and stiffness of hawkmoth wings and produce the same lift at the moth's flapping frequency. Some day, robots using these wings and moth olfactory awareness might help detect underground chemical weapons facilities or locate a person buried at a disaster site, said biologist Mark Willis.
An aim of biorobotics is to make smart, agile machines that can operate without continuous human control to complete tasks too dangerous or difficult for humans. To get there, engineers such as Quinn gain insight and understanding by collaborating with biologists such as Mark Willis, PhD, a self-described "total bughead" who studies how insects adapt their behaviors to different conditions.
"The goal is … to explore the cool and amazing things our little friends can do," said Willis, professor and chair of the university's Department of Biology.
Like Quinn, Willis secures funding primarily from the National Science Foundation and research arms of the U.S. Air Force, Navy and other sources in the Department of Defense. While the government has funded development of robots that could sniff out bombs or target incoming missiles, Willis said his grantors focus on the need for basic research to understand the behaviors of animals that are models for the robots.
 PHOTO: Michael F. McElroy
PHOTO: Michael F. McElroyWORM: This robot mimics how a worm moves using muscular contractions. Eventually, worm-like robots could be used to access confined spaces for medical applications, buried infrastructure inspections or search and-rescue efforts, said engineer Kathryn Daltorio.
Need a robot to think faster? Fly smarter? "Bugs have solved these problems already," said Jessica Fox, PhD, assistant professor of biology. The trick is locating the one desired function among the animal's interconnected systems. And when you think you have it, robots can be used to isolate your findings and test.
Sometimes, animal-inspired robots still look like, well, robots. In the lab of Kathryn Daltorio, PhD (CWR '05; GRS '07, '13, mechanical engineering), assistant professor of mechanical engineering, robots with wheels and metal antennae have in their brains a mathematic formula that allows them to move like a cockroach. It's a skill that could make robots better at searching unfamiliar spaces.
And sometimes bioinspiration moves robots even further from their metallic predecessors. Vickie Webster-Wood, PhD (CWR '12; GRS '13, '17, mechanical engineering), a postdoctoral researcher, has created a biohybrid robot by attaching sea slug muscle to a 3-D printed polymer. Such a biorobot could one day explore sensitive aquatic environments to monitor for pollution without posing a risk to the ecosystem.
 PHOTO: David Miranda
PHOTO: David MirandaSWARM ROBOTS: Each robot is primitive, like a single scout from a beehive, but the data they amass together provides maps of situations too dangerous for humans. Kiju Lee is developing several models, including a hive of 100. Her team is using a maze to test the navigation skills of the robots, which look like black cubes.
In the lab of Kiju Lee, PhD, a robot resembling a penguin is being developed to someday help monitor nursing home residents. For example, if a person failed to respond to the robot's waving gesture, the robot could alert a human caregiver, said Lee, an assistant professor in the Department of Mechanical and Aerospace Engineering.
The bioinspired revolution on campus started with a project to build a legged robot. Quinn told his two collaborators: "Why not? How hard can it be?
"Here we are, 28 years later," he said, "and we're still trying to perfect it."
Four Things We Want Robots To Do
Researchers on campus are learning from animals and incorporating their best traits into robots that can do work better, faster and safer. Here are examples of their often-interdisciplinary collaborations.
- Follow prey like a mantis. These excellent hunters can target a single prey and follow it through a crowded field. Developing similar targeting sensors would allow a robot to track and destroy an incoming missile.
- Course correct like a fly. Some flying insects have gyroscopic body structures, found behind their wings, that help stabilize their flight. Such sensors would create more agile flying robots that rely less on complex vision systems.
- Think like an insect. Insects have small brains relative to mammals, but they are adept at taking in huge amounts of sensory data and making good decisions based on their environment and needs. Increasingly intelligent robots with insect-inspired neurology, such as extraterrestrial explorers and autonomous lawn mowers, will not only perform programmed tasks but also learn from experience and make their own decisions.
- Find shelter like a cockroach. This insect hugs walls when exploring and seeking shelter. Robots with similar mindsets could better explore unfamiliar spaces and report on their surroundings.




